很多时候,在一些大型的装配机械应用中你可能需要做启停的顺序逻辑控制。这些顺序控制保证在使用急停电路之前和保护通道打开之前正确地停下你的机器,很明显,通过这样控制机器的停止是有好处的。如果一个自动化过程启动以后,你想在停止机器之前允许它结束工作,特别是有一个必需的装配顺序在你的自动化机器工作周期中。一个控制停止更优于使用急停,所以你不必释放信息的跟踪,或者在周期的中间停止。
这儿有一些你需要理解的编辑一个控制启停顺序逻辑的程序设计基础。我将调用我的那些主控位,对于启动按钮我也会定义。那些主控位用于逻辑中的任何地方,来防止自动化过程的再次启动和他们已经完成时的监测。
主控位定义:
启动请求(START_REQ):在操作员按下必需的周期启动按钮(PB_START)后这个位闭合,在运行位(RUNNING)闭合后,这个位打开。
典型梯形图:

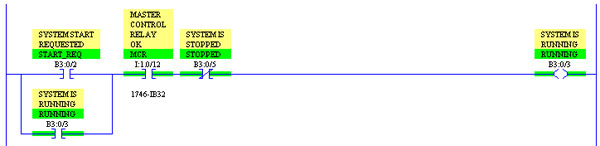
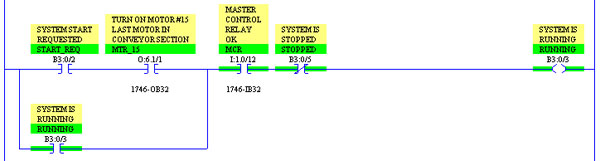
运行(RUNNING):在启动请求发生之后,这个位闭合,通常在输送系统中最后一个电机启动以后。如果你没有输送电机这个梯级会直接闭合。如果你有输送电机或者在系统进入自动循环运行之前你可能要对其它的一些过程做预启动,那么插入最后一个电机的触点或预启动的条件在START_REQ和MCR指令之间,那么必须最后一台电机启动或预启动条件满足以后,运行位(RUNNING)才会闭合。这个运行位用在每一个顺序中来允许顺序启动。
下面是没有输送电机的典型梯形图:
下面是有输送电机的典型梯形图:
停机请求(STOP_REG):当周期停止按钮被按下,或者有人将机器从自动模式切换到手动模式时,停机请求位闭合。这个位也用在每一个梯级中,当停止请求发出后禁止设备再次启动,当停止位(STOPPED)闭合后,这个梯级被释放。
典型梯形图:

停机(STOPPED):当同意停机位(OK_TO_STOP)被触发后这个位闭合,这个梯级触发后,上面的运行位被停止。
典型梯形图:

同意停机(OK
TO STOP):这个位监控机器中所有的顺序步。有代表性地,我写了一个位在周期中调用,为我机器中的每一个顺序。一旦我启动了一个站进入自动控制周期,我机器中的每个站都有一个循环位,如果那些站还在动作,我使用这个位就可以让我知道。如果所有的站都完成了动作,然后就可以停机了,停机请求位将保持直到站点再次启动。
典型的梯形图:
那么现在你对主控位有了一个基本的理解了,你可以用主控位来控制一个顺序逻辑的启停。在每一个顺序逻辑或机器上的自动控制站中,我调用了一些其它的子位:OK,INCYCLE和DONE,当所有的条件都满足后,就可以启动顺序逻辑,一旦顺序逻辑启动以后,就进入INCYCLE状态,然后完成一系列编程要求完成的动作。当站点返回到原位置的时候,那么完成位就是DONE。一旦完成位到来,那么INCYCLE位就断开,我们准备启动另外一个周期。下面的梯形图中你将注意到,主控位RUNNING对于启动过程来说是必需的,而且机器不能处在停机请求STOP
REQUEST状态。
典型顺序逻辑梯形图:
