|
在五相步进电机的模拟控制实验区完成本实验
一、
实验目的
了解并掌握移位指令在控制中的应用及其编程方法。
二、控制要求
要求对五相步进电动机五个绕组依次自动实现如下方式的循环通电控制:
第一步:A-B-C-D-E
第二步:A-AB-BC-CD-DE-EA
第三步:AB-ABC-BC-BCD-CD-CDE-DE-DEA
第四步:EA-ABC-BCD-CDE-DEA
三、五相步进电动机的模拟控制的实验面板图:图6-5-1所示
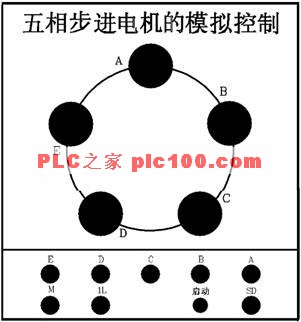
五相步进电机的模拟控制面板
上图中,下框中的A、B、C、D、E分别接主机的输出点Q0.1、Q0.2、Q0.3、Q0.4、Q0.5;SD接主机的输入点I0.0。上框中发光二极管的点亮与熄灭用以模拟步进电机五个绕组的导电状态。
四、编制梯形图并写出程序,
实验参考程序,表6-5-1
|
步序 |
指 令 |
步序 |
指 令 |
|
0 |
LD I0.0
启动输入 |
26 |
O M20.5 |
|
1 |
AN M0.0 |
27 |
O M20.6 |
|
2 |
TON T37, +20
延时2S |
28 |
O M21.1 |
|
3 |
LD T37 |
29 |
= Q0.1 A相电机运转 |
|
4 |
= M0.0 |
30 |
LD M10.2 |
|
5 |
LD I0.0 |
31 |
O M10.7 |
|
6 |
TON T39, +30
延时3S
|
32 |
O M11.0 |
|
7 |
AN T39 |
33 |
O M11.4 |
|
8 |
= M1.0 |
34 |
O M11.5 |
|
9 |
LD M1.0 |
35 |
O M11.6 |
|
10 |
O M0.2 |
36 |
O M11.7 |
|
11 |
= M10.0 |
37 |
O M20.6 |
|
12 |
LD M11.7 |
38 |
O M20.7 |
|
13 |
= M20.0 |
39 |
= Q0.2 B相电机运转 |
|
14 |
LD M21.1 |
40 |
LD M10.3 |
|
15 |
TON T38, +20
延时2S |
41 |
O M11.0 |
|
16 |
AN T38 |
42 |
O M11.1 |
|
17 |
= M0.2 |
43 |
O M11.5
|
|
18 |
LD M0.0
移位输入 |
44 |
O M11.6 |
|
19 |
SHRB M10.0, M10.1,
+15 |
45 |
O M11.7 |
|
20 |
SHRB M20.0, M20.1,
+9 |
46 |
O M20.1 |
|
21 |
LD M10.1 |
47 |
O M20.2 |
|
22 |
O M11.3 |
48 |
O M20.6
|
|
23 |
O M11.4 |
49 |
O M20.7 |
|
24 |
O M11.5 |
50 |
O M21.0 |
|
25 |
O M20.4 |
51 |
= Q0.3 C相电机运转 |
|
步序 |
指 令 |
步序 |
指 令 |
|
52 |
LD M10.4 |
63 |
= Q0.4 D相电机运转 |
|
53 |
O M11.1 |
64 |
LD M10.5 |
|
54 |
O M11.2 |
65 |
O M11.2 |
|
55 |
O M11.7 |
66 |
O M11.3 |
|
56 |
O M20.1 |
67 |
O M20.2 |
|
57 |
O M20.2 |
68 |
O M20.3 |
|
58 |
O M20.3 |
69 |
O M20.4 |
|
59 |
O M20.4 |
70 |
O M20.5 |
|
60 |
O M20.7 |
71 |
O M21.0 |
|
61 |
O M21.0 |
72 |
O M21.1 |
|
62 |
O M21.1 |
73 |
= Q0.5 E相电机运转 |
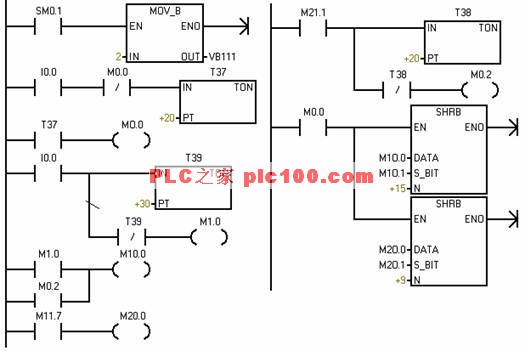
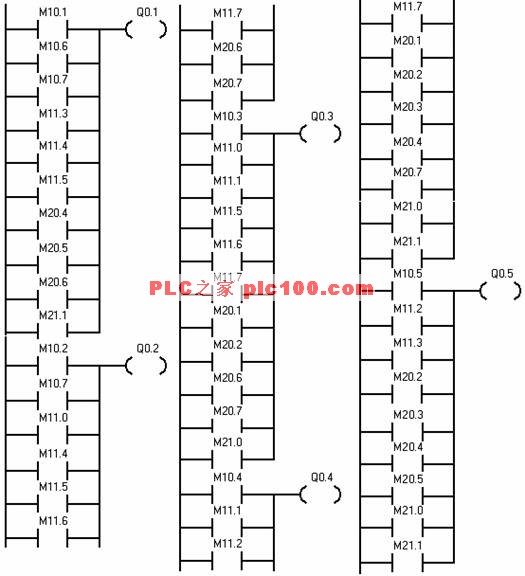
参考梯形图如6-5-2所示:
五、实验设备
1、THSMS-A型、THSMS-B型实验装置THSMS-1型、THSMS-2型实验箱一台
2、安装了STEP7-Micro/WIN32编程软件的计算机一台
3、PC/PPI编程电缆一根
1、
锁紧导线若干
六、
实验设备
1、THSMS-A型、THSMS-B型实验装置或THSMS-1型、THSMS-2型实验箱一台
2、安装了STEP7-Micro/WIN32编程软件的计算机一台
3、PC/PPI编程电缆一根
4、锁紧导线若干 |