|
|
|
|
|
|
|
|
四节传送带的模拟
|
|
2024-02-10 来源:本站 |
 |
|
|
实验设备
1、THSMS-A型、THSMS-B型实验装置或THSMS-1型、THSMS-2型实验箱一台
2、安装了STEP7-Micro/WIN32编程软件的计算机一台
3、PC/PPI编程电缆一根
4、锁紧导线若干
一、
实验目的
通过使用各基本指令,进一步熟练掌握PLC的编程和程序调试。
二、控制要求
有一个用四条皮带运输机的传送系统,分别用四台电动机带动,控制要求如下:
启动时先起动最末一条皮带机,经过5秒延时,再依次起动其它皮带机。
停止时应先停止最前一条皮带机,待料运送完毕后再依次停止其它皮带机。
当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机以后的皮带机待运完后才停止。例如M2故障,M1、M2立即停,经过5秒延时后,M3停,再过5秒,M4停。当某条皮带机上有重物时,该皮带机前面的皮带机停止,该皮带机运行5秒后停,而该皮带机以后的皮带机待料运完后才停止。例如,M3上有重物,M1、M2立即停,再过5秒,M4停。
三、四节传送带的模拟实验面板图:图6-12-1所示
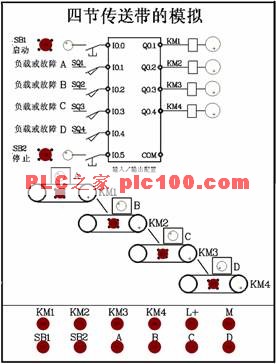
四节传送带的模拟控制面板
上图下框中的KM1、KM2、KM3、KM4分别接主机的输出点Q0.1、Q0.2
、Q0.3、Q0.4:SB1、SB2、分别为主机的输入点.I0.0、I0.5;表示负载或故障设定的A、B、C、D分别接主机输入点I0.1、I0.2、I0.3、I0.4。上框中启动、停止用动合按钮来实现,负载或故障设置用钮子开关来模拟,电机的停转或运行用发光二极管来模拟。
四、编制梯形图并写出实验程序,
(一)
故障时的实验参考程序
表6-12-1所示
|
步序 |
指 令 |
步序 |
指 令 |
|
0 |
LD I0.0
启动按钮 |
23 |
= M4.0 |
|
1 |
O M1.0 |
24 |
LD M4.0 |
|
2 |
AN I0.5 |
25 |
TON T40, +50 |
|
3 |
S Q0.4, 1 D电机运行 |
26 |
LD T40 |
|
4 |
= M1.0 |
27 |
R Q0.2, 1 B电机停转 |
|
5 |
LD M1.0 |
28 |
= M5.0 |
|
6 |
TON T37, +50 |
29 |
LD M5.0 |
|
7 |
LD T37 |
30 |
TON T41, +50 |
|
8 |
S Q0.3, 1 C电机运行 |
31 |
LD T41 |
|
9 |
= M2.0 |
32 |
R Q0.3, 1 C电机停转 |
|
10 |
LD M2.0 |
33 |
= M6.0 |
|
11 |
TON T38, +50 |
34 |
LD M6.0 |
|
12 |
LD T38 |
35 |
TON T42, +50 |
|
13 |
S Q0.2, 1 B电机运行 |
36 |
LD T42 |
|
14 |
= M3.0 |
37 |
R Q0.4, 1 D电机停转 |
|
15 |
LD M3.0 |
38 |
LD I0.1
故障A |
|
16 |
TON T39, +50 |
39 |
R Q0.1, 1 A电机停转 |
|
17 |
LD T39 |
40 |
= M7.0 |
|
18 |
S Q0.1, 1 A电机运行 |
41 |
LD M7.0 |
|
19 |
LD I0.5
停止按钮 |
42 |
TON T43, +50 |
|
20 |
O M4.0 |
43 |
LD T43 |
|
21 |
AN I0.0 |
44 |
R Q0.2, 1 B电机停转 |
|
22 |
R Q0.1, 1 A电机停转 |
45 |
= M8.0 |
|
步序 |
指 令 |
步序 |
指 令 |
|
46 |
LD M8.0 |
63 |
TON T46, +50 |
|
47 |
TON T44, +50 |
64 |
LD T46 |
|
48 |
LD T44 |
65 |
R Q0.4, 1 D电机停转 |
|
49 |
R Q0.3, 1 C电机停转 |
66 |
LD I0.3
故障C |
|
50 |
= M9.0 |
67 |
R Q0.1, 1 A电机停转 |
|
51 |
LD M9.0 |
68 |
R Q0.2, 1 B电机停转 |
|
52 |
R Q0.4, 1 D电机停转 |
69 |
R Q0.3, 1 C电机停转 |
|
53 |
LD I0.2
故障B |
70 |
= M12.0 |
|
54 |
R Q0.1, 1 A电机停转 |
71 |
LD M12.0 |
|
55 |
R Q0.2, 1 B电机停转 |
72 |
TON T47, +50 |
|
56 |
= M10.0 |
73 |
LD T47 |
|
57 |
LD M10.0 |
74 |
R Q0.4, 1 D电机停转 |
|
58 |
TON T45, +50 |
75 |
LD I0.4
故障D |
|
59 |
LD T45 |
76 |
R Q0.1, 1 A电机停转 |
|
60 |
R Q0.3, 1 C电机停转 |
77 |
R Q0.2, 1 B电机停转 |
|
61 |
= M11.0 |
78 |
R Q0.3, 1 C电机停转 |
|
62 |
LD M11.0 |
79 |
R Q0.4, 1 D电机停转 |
| |
|
|
|
|
(二)
重物时实验参考程序表6-12-2所示
|
0 |
LD I0.0 |
7 |
LD T37
|
|
1 |
O M1.0 |
8 |
S Q0.3, 1 C电机运行 |
|
2 |
AN I0.5 |
9 |
= M2.0 |
|
3 |
S Q0.4 D电机运行 |
10 |
LD M2.0 |
|
4 |
= M1.0 |
11 |
TON T38, +50 |
|
5 |
LD M1.0 |
12 |
LD T38 |
|
6 |
TON T37, +50 |
|
S Q0.2, 1 B电机运行 |
|
步序 |
指 令 |
步序 |
指 令 |
|
14 |
= M3.0 |
39 |
TON T43, +50 |
|
15 |
LD M3.0 |
40 |
LD T43 |
|
16 |
TON T39, +50 |
41 |
R Q0.1, 1 A电机停转 |
|
17 |
LD T39 |
42 |
= M7.0 |
|
18 |
S Q0.1, 1 A电机运行 |
43 |
LD M7.0 |
|
19 |
LD I0.5
停止按钮 |
44 |
TON T44, +50 |
|
20 |
O M4.0 |
45 |
LD T44 |
|
21 |
AN I0.0 |
46 |
R Q0.2, 1 B电机停转 |
|
22 |
R Q0.1, 1 A电机停转 |
47 |
= M8.0 |
|
23 |
= M4.0 |
48 |
LD M8.0 |
|
24 |
LD M4.0 |
49 |
TON T45, +50 |
|
25 |
TON T40, +50 |
50 |
LD T45 |
|
26 |
LD T40 |
51 |
R Q0.3, 1 C电机停转 |
|
27 |
R Q0.2, 1 B电机停转 |
52 |
= M9.0 |
|
28 |
= M5.0 |
53 |
LD M9.0 |
|
29 |
LD M5.0 |
54 |
TON T46, +50 |
|
30 |
TON T41, +50 |
55 |
LD T46 |
|
31 |
LD T41 |
56 |
R Q0.4, 1 D电机停转 |
|
32 |
R Q0.3, 1 C电机停转 |
57 |
LD I0.2 B负载 |
|
33 |
= M6.0 |
58 |
R Q0.1, 1 A电机停转 |
|
34 |
LD M6.0 |
59 |
= M10.0 |
|
35 |
TON T42, +50 |
60 |
LD M10.0 |
|
36 |
LD T42 |
61 |
TON T47, +50 |
|
37 |
R Q0.4, 1 D电机停转 |
62 |
LD T47 |
|
38 |
LD I0.1 A负载 |
63 |
R Q0.2, 1 B电机停转 |
|
步序 |
指 令 |
步序 |
指 令 |
|
64 |
= M11.0 |
81 |
LD T50 |
|
65 |
LD M11.0 |
82 |
R Q0.3, 1 C电机停转 |
|
66 |
TON T48, +50 |
83 |
= M14.0 |
|
67 |
R Q0.3, 1 C电机停转 |
84 |
LD M14.0 |
|
68 |
LD T48 |
85 |
TON T51, +50 |
|
69 |
R Q0.3, 1 |
86 |
LD T51 |
|
70 |
= M12.0 |
87 |
R Q0.4, 1 D电机停转 |
|
71 |
LD M12.0 |
88 |
LD I0.4 D负载 |
|
72 |
TON T49, +50 |
89 |
R Q0.1, 1 A电机停转 |
|
73 |
LD T49 |
90 |
R Q0.2, 1 B电机停转 |
|
74 |
R Q0.4, 1 D电机停转 |
91 |
R Q0.3, 1 C电机停转 |
|
75 |
LD I0.3 C负载 |
92 |
= M15.0 |
|
76 |
R Q0.1, 1 A电机停转 |
93 |
LD M15.0 |
|
77 |
R Q0.2, 1 B电机停转 |
94 |
TON T52, +50 |
|
78 |
= M13.0 |
95 |
LD T52 |
|
79 |
LD M13.0 |
96 |
R Q0.4, 1 D电机停转 |
|
80 |
TON T50, +50 |
|
|
参考梯形图如下所示(重物设置):
 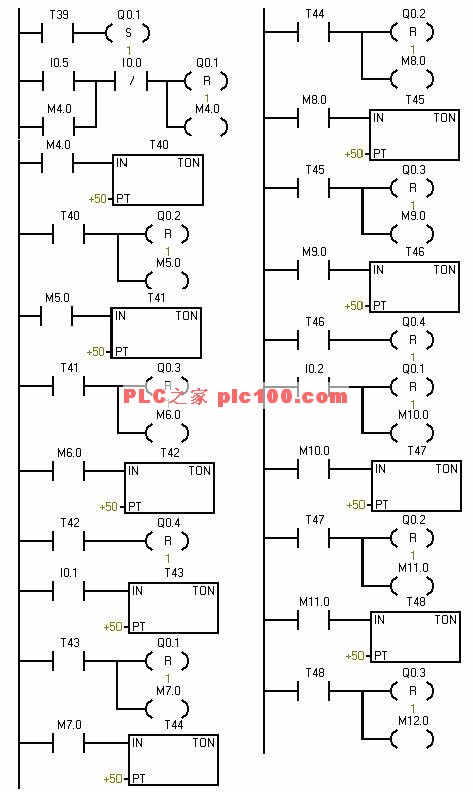  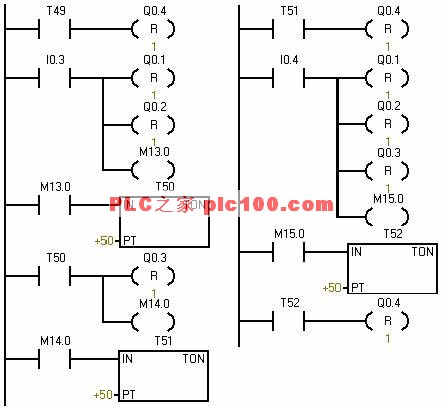
图6-12-2
参考梯形图如下所示(故障设置):
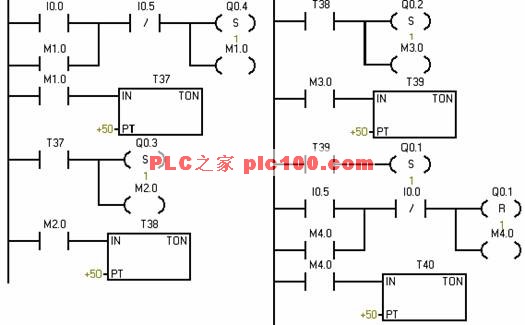
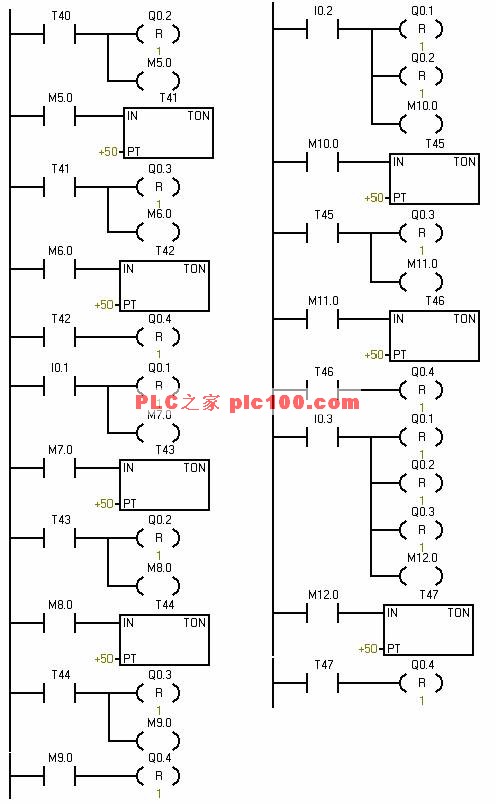
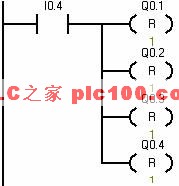
图6-12-3
|
|
|
|
|