|
一、 训练内容:
1、项目描述
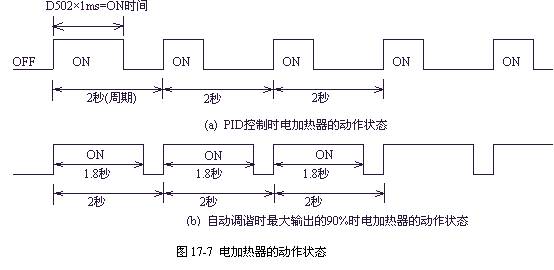
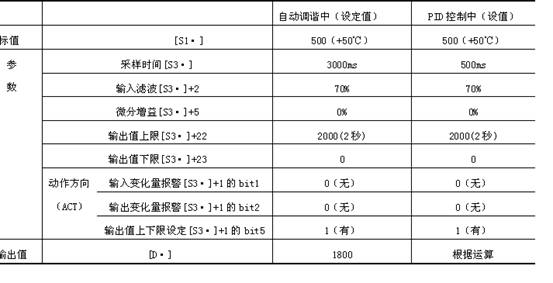
在炉温控制系统中,炉子由电加热器加热,炉温用热电耦检测,与热电耦型温度传感器匹配的模拟量输入模块 FX2N-4AD-TC将温度转换为数字输出,CPU将检测的温度与温度设定值比较,通过PLC的PID控制改变加热器的加热时间从而实现对炉温的闭环控制。PID控制时和自动调谐时电加热器的动作情况如图17-7示。其参数设定内容如表17-7所示。
表17-7
参数设定内容
2、实训要求
2.1
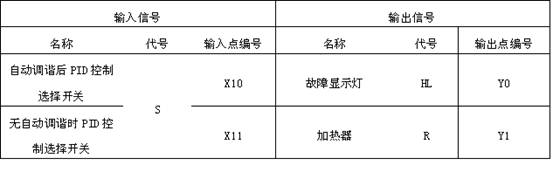
输入和输出点分配表
见表17-8。
表17-8
输入与输出点分配表
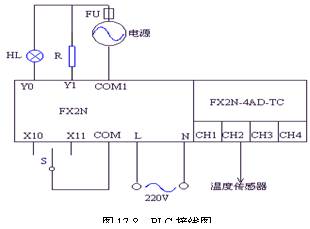
2.2 PLC接线图
按图17-8接好线。配线时,应使用带屏蔽的补偿导线和模拟输入电缆配合,屏蔽一切可能产生的干扰。FX2N-4AD-TC的特殊功能模块编号为0。
2.3
程序设计
用选择开关置X10作为自动调谐控制后的PID控制,用选择开关置X11作为无自动调谐的PID控制。当选择开关置X10时,控制用参数的设定值在PID运算前必须预先通过指令写入,见图17-9,程序0步开始,M8002为初始化脉冲,用MOV指令将目标值、输入滤波常数、微分增益、输出值上限、输出值下限的设定值分别传送给数据寄存器D500、D512、D515、D532、D533。程序第26步,使M0得电,使用自动调谐功能是为了得到最佳PID控制,自动调谐不能自动设定的参数必须通过指令设定,在第29步~47步之间用MOV指令将自动调谐用的参数(自动调谐采用时间、动作方向自动调谐开始、自动调谐用输出值)分别传送给数据寄存器D510、D511、D502。程序第53步开始,对FX2N-4AD-TC进行确认、模式设定,且在PLC运行中读取来自FX2N-4AD-TC的数据送到PLC的D501中,103步开始对PID动作进行初始化。第116步开始,X10闭合,在自动调谐后实行PID控制,当自动调谐开始时的测定值达到目标值的变化量变化1/3以上,则自动调谐结束,程序第128步~140步,自动调谐结束,转移到通常动作,M1复位,第47步,将通常动作的采样时间设定值500ms用脉冲执行型MOV(P)指令送给D510,进行PID控制。
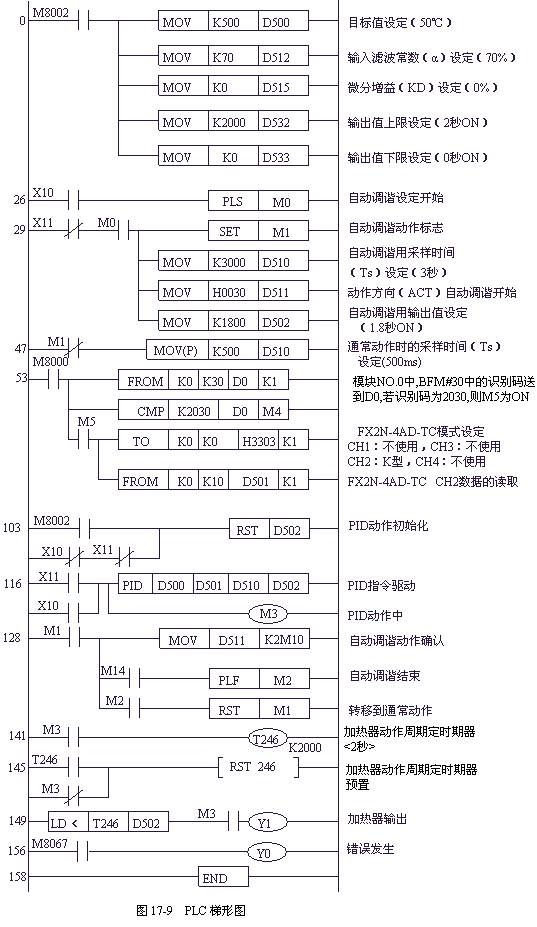
用选择开关置X11作为无自动调谐的PID控制(当选择开关置断开位置时,将PID动作初始化,即D502清零)。程序116步,执行PID指令。加热器动作周期T246设为2秒,当加热器动作周期2秒钟到,通过复位指令将T246清零,因为M3动作,T246重新计时。通过触点比较指令,控制加热器是否工作,由于PID调节获得需要的加热时间的数据置于D502中,D502不是固定值,靠PID来调节,在PID调节过程中,M3动合触点始终是闭合的,当加热时间通过T246记录的数据小于PID传送的数据D502时,加热器加热,否则停止加热,等待加热器动作周期2秒到,T246清零并重新计时,此时加热器又加热,周而复始。因而通过PID控制不断调节加热器的加热时间,从而实现了恒温控制。当控制参数的设定值或PID运算中的数据发生错误时,则运算错误标志辅助继电器M8067变为ON状态,通过Y0输出给故障指示灯显示。
2.4运行并调试程序
(1)将梯形图程序输入到计算机,检查电源正确无误。
(2)对程序进行调试运行
a.
将选择开关S置X10,先执行自动调谐,观察程序的运行情况;
b.将选择开关S置X11,仅执行PID控制,观察程序的运行情况。
(3)调试运行记录: |