比例积分微分控制指令PID用于模拟量闭环控制,[S1・]
[S2・] 各用一个数据寄存器,[S1・] 用于存放设定目标值,[S2・]
用于设定测定当前值, [S3・]是用户为PID指令定义参数的首址,范围是D0~D7975,需占有自[S3・]起始的25个连续的数据寄存器,其中[S3・]
~[S3・] +6设定控制参数。[D・]用一个独立的数据寄存器,用于存放输出值。执行程序时,运算结果存于[D・]中。PID指令的功能是接收一个输入数据后,根据PID算法计算调节值。在图17-3中,X0闭合时,执行指令,目标值存入D10中,当前值从D20中读出,保留D100~D124作为用户定义参数的寄存器,输出值存入D150,一个程序中可以使用多条PID指令,每条指令的数据寄存器都要独立,以避免混乱。PID指令在定时器中断、子程序、步进梯形图、跳转指令中也可使用,在这种情况下,执行PID指令前请清除[S3・]
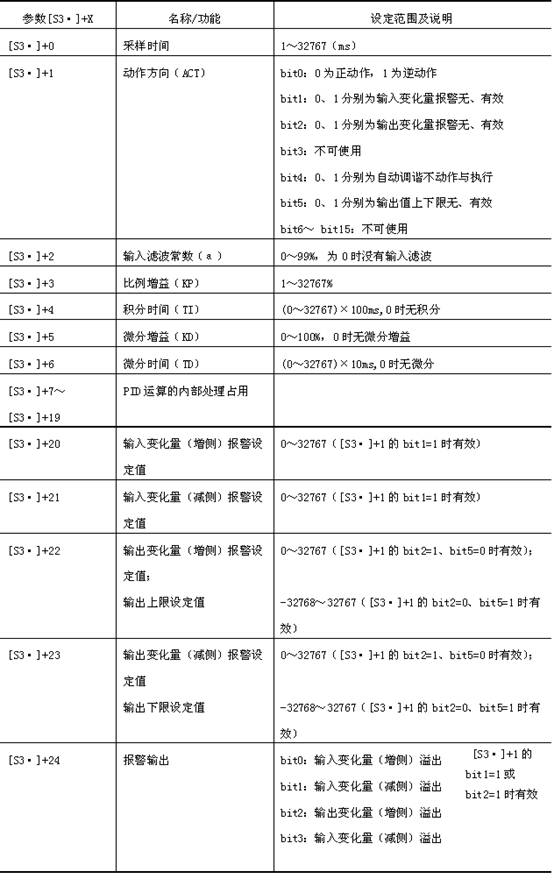
+7后再使用,采样时间必须大于PLC的一个运算周期。控制用的参数的设定值(参数设定见表17-5)必须预先通过MOV等指令写入。
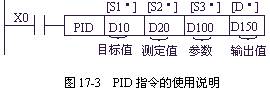
表17-5
参数设定