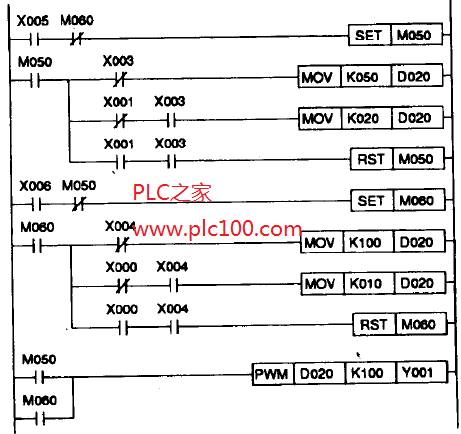
下面程序阐述了一种多速度/定位技术。
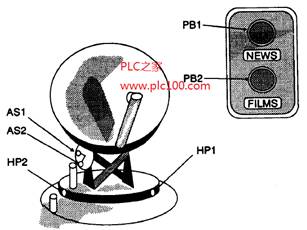
该系统包括一个由两个伺服电机定位的圆盘天线。系统有硬件和软件互锁,使得每个电机能独立地工作。软件互锁会在程序别的地方出现。
选择所要求的按钮PB1或PB2,程序开始运行。此选择设定了“运行”顺序。
面盘天线先在一个平面内移动,直到位置传感器捕捉到目标。此时,第二平面运动开始,当圆盘天线到达它的最终位置,系统复位。
因为每个平面运动都被独立地控制,可以用不同的速度。本节的例子程序使用4种不同速度。按照要求,这些速度被送入数据寄存器D020。应当特别注意当K100值送入数据寄存器D020时的速度设定。PWM指令将提供一个连续的输出信号。因为输出信号时间段(
D020)等于信号频率。