|
如图6-19所示是一台工件传送的气动机械手的动作示意图,其作用是将工件从A点传递到B点。气动机械手的升降和左右移行作分别由两个具有双线圈的两位电磁阀驱动气缸来完成,其中上升与下降对应电磁阀的线圈分别为YV1与YV2,左行、右行对应电磁阀的线圈分别为YV3与YV4。一旦电磁阀线圈通电,就一直保持现有的动作,直到相对的另一线圈通电为止。气动机械手的夹紧、松开的动作由只有一个线圈的两位电磁阀驱动的气缸完成,线圈(YV5)断电夹住工件,线圈(YV5)通电,松开工件,以防止停电时的工件跌落。机械手的工作臂都设有上、下限位和左、右限位的位置开关SQ1、SQ2和SQ3、SQ4,夹持装置不带限位开关,它是通过一定的延时来表示其夹持动作的完成。机械手在最上面、最左边且除松开的电磁线圈(YV5)通电外其它线圈全部断电的状态为机械手的原位。
图6-19
机械手示意图
机械手的操作面板分布情况如图6-20所示,机械手具有手动、单步、单周期、连续和回原位五种工作方式,用开关SA进行选择。手动工作方式时,用各操作按钮(SB5、SB6、SB7、SB8、SB9、SB10、SB11)来点动执行相应的各动作;单步工作方式时,每按一次起动按钮(SB3),向前执行一步动作;单周期工作方式时,机械手在原位,按下起动按钮SB3,自动地执行一个工作周期的动作,最后返回原位(如果在动作过程中按下停止按钮SB4,机械手停在该工序上,再按下起动按钮SB3,则又从该工序继续工作,最后停在原位);连续工作方式时,机械手在原位,按下起动按钮(SB3),机械手就连续重复进行工作(如果按下停止按钮SB4,机械手运行到原位后停止);返回原位工作方式时时,按下“回原位”按钮SB11,机械手自动回到原位状态。
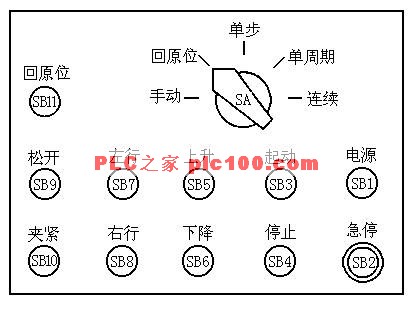
图6-20
机械手操作面板示意图 |