一 引言
目前,运动控制器在工业上的应用越来越多,主要涉及一些产品的加工,装配,以及产品的后期组装等等,诸如,塑料成型机(注塑机),妇女,儿童用品生产线,。。。有时,同步控制在其中的应用显得尤其重要。三菱电机生产的运动控制器中,SV22版本具有十分强大的功能,对于同步控制,具有其他产品或控制器无法比拟的优点。
三菱电机的运动控制器目前主要有A系列和Q系列。A系列包括A171(最多4轴),A172(最多8轴),A173(最多32轴)和A273(最多32轴),Q系列包括Q172(最多8轴)和Q173(最多32轴);值得一提的是,Q系列可以多CPU运行,目前至多可以有3个运动控制器CPU,也就是说,可以最多控制32*3=96轴,在多工序,多动作的控制系统中,可以显现出强大的功能。另外,其OS版本多样化(包括SV13,SV22,…….),决定了运动控制器在工业上应用的灵活性。
本文就三菱A171运动控制器在电线生产过程中的实际应用,详细说明SV22的同步系统构成。
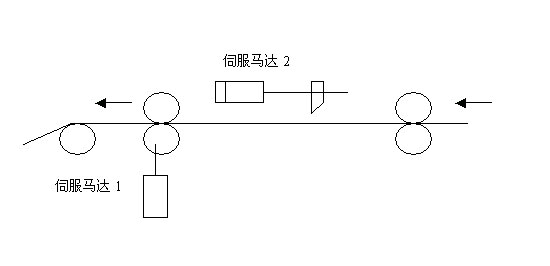
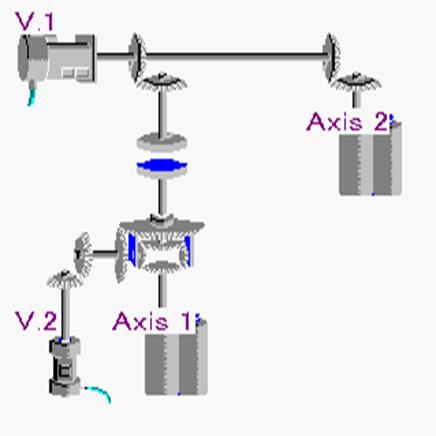
二.工作机械构成图
三.动作说明
(1)上图中,电线从右向左运动,目的是在线上等长地刻出所需要的标记或数字;
(2)伺服马达1用恒速度控制,伺服马达2与其同步运行后,在需要的长度地方产生动作;
(3)在一个工作周期中,包括伺服马达2的前进和后退;
(4)上述过程在归零之后一直重复进行。
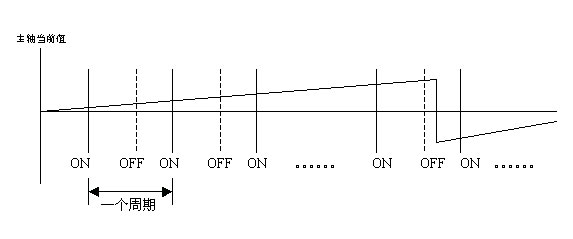
动作地址示意图:
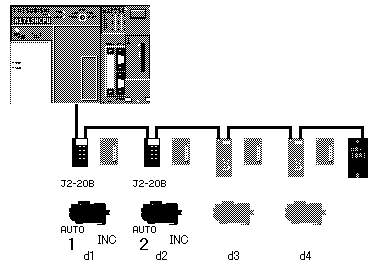
四.系统构成
五.输入输出点的分布:
X0:两轴归零; X5:启动;
X1:停止; X3:一轴点动正转;X4:一轴点动正转; X6:一轴点动正转;
X7:一轴点动正转; X15:实模式向虚拟模式转换;
X8:当前值设定;
X9:虚拟轴一点动正转XA:虚拟轴一点动反转;XC:虚拟轴二点动正转XD:虚拟轴二点动反转D110:CLUTCH ON地址; D120:CLUTCH OFF地址;
D130:轴1的转矩限制;
D132:轴2的转矩限制; D100:模式设定;
M100:CLUTCH ON/OFF标志;
D140:滑行量;
XB:满足在电线上动作条件
六.机械模型
机械设定参数:
[连接齿轮]
输入齿数:1
输出齿数:1
输出运转方向:正转
[辅助齿轮]
输入齿数:1
输出齿数:1
输出运转方向:正转
[终端齿轮]
输入齿数:1
输出齿数:1
输出运转方向:正转
[辅助伺服马达]
辅助输入轴号:2
极限限制:最大值:2147483647,最小值:0
指令到位范围:100
JOG速度限制值:300000
JOG参数块:1
故障时运转模式:继续
[伺服马达]
虚拟输入轴号:1
极限限制:最大值:2147483647,最小值:0
指令到位范围:100
JOG速度限制值:300000
JOG参数块:1
故障时运转模式:继续
[roll-2]
输出轴号:2
单位:mm
roll直径:10.0000
roll一圈的脉冲数:100000
滞留脉冲允许值:65535
速度限制值:10000.00
[roll-1]
输出轴号:1
单位:mm
roll直径:10.0000
roll一圈的脉冲数:100000
滞留脉冲允许值:65535
速度限制值:10000.00
[Clutch参数]
控制模式:地址模式
模式设定:D100
ON/OFF指令:M100
ON地址设定:D110
OFF地址设定:D120
平滑方式:定时
平滑时间:0
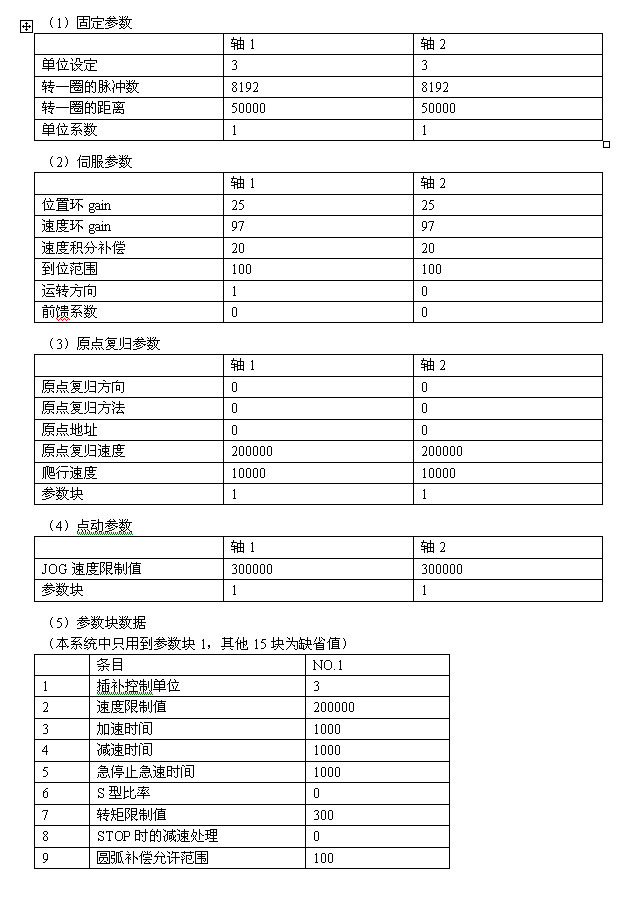
七.参数
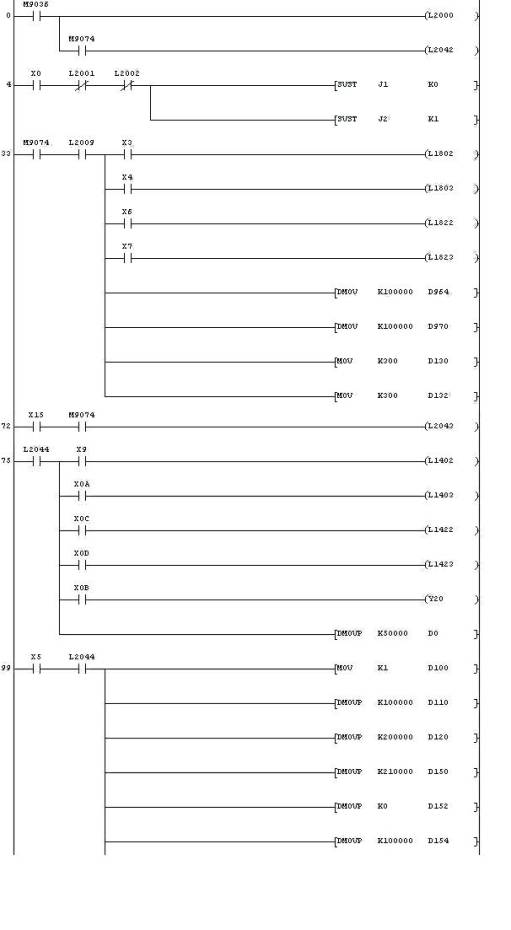
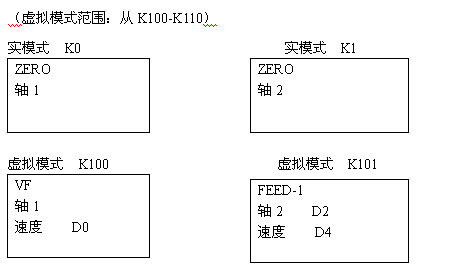
八.伺服程序
九.部分PLC程序(见文后)
十.结束语
同步控制中,驱动模型,传输模型,输出模型可以有多种选择,本文想作为抛砖引玉,选用的模型可能不是最佳,但可以说明问题;其他模型的使用,在后续文章中将陆续介绍。