|
【摘
要】
在武钢硅钢厂滚焊机电气改造中应用PLC组成两级监控系统,它具有完善的故障处理功能。本文简要介绍了生产工艺流程及主要控制功能的实现,着重论述了PLC在系统中的功能及其软、硬件的设计方法。系统投入运行后取得了良好的经济效益。
【关键词】
滚焊机;PLC;通信;状态设计法
武钢硅钢厂在生产硅钢带时,为连续生产,用滚焊机将前后两卷钢带首尾焊接,生产工艺完成后,再由剪切机切割分开,以提高生产效率。该厂的滚焊机系统是70年代从日本全套引进的,经过20多年的长期运行,电气设备老化严重,动作可靠性差,严重影响正常生产。在对其电控系统的技术改造中,用先进的PLC控制取代继电器逻辑控制,添加通信功能,实时显示各主体设备的状态变化及故障报警画面,组成控制、监管相结合的一体化系统。
1
生产工艺简介
焊接时,两卷钢带首尾搭接,在接触面流通强电流,接触电阻及金属固有电阻产生电阻热,使焊接接点温度达到金属可熔化的适当温度,同时对其加压使之接合。
钢带焊接生产工艺如图1所示。主要由钢带搭接定位、压紧,钢带焊接,焊接复位、作业线运行三个阶段组成。简介如下。
运行中的先行带经钢带检测器检测到末端时,停止在下部电极上→挡板下降→后行带前进至挡板位置与先行带搭接→导辊下降→压板下降→电极下降→小车前进。
钢带检测器、电极轮及其升降装置搭载在小车上,小车前进到钢带上方时,钢带检测开关由OFF→ON,使电极通电开始焊接。焊接电流的传导方向为:焊接变压器→电极轮1→焊接钢带→下部电极→电极轮2→焊接变压器。当焊接到钢带边沿时,钢带检测开关变为OFF而使焊接停止。
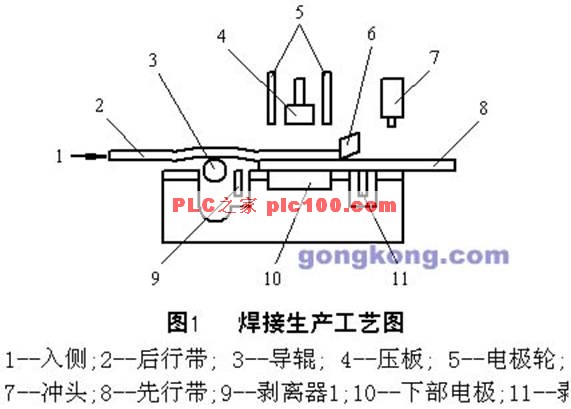
小车前进到“前进极限点”停止→冲头下降,延时0.5S后自动上升→电极、挡板、压板依次上升→剥离器上升,使钢带脱离下部电极,延时2S后剥离器下降→导辊上升。
以上过程即完成一个单程焊接。为加固两带焊接,通常需来回焊接两次,即再增加一次后退焊接。当需后退焊接时,先将两钢带重合部向前移动一段(但不得偏离下部电极),再按以上次序将焊机各装置重复动作一次,所不同的是小车此次为后退运行,并后退到“原位置”停止。此时启动作业线又可循环运行。
2
系统硬件配置
根据生产工艺,采用典型的两级监控方式。上位机为生产管理级,完成对下位机的监控、生产操作管理等,主要面向操作人员;下位机为基础测控级,完成生产现场的数据采集及过程控制等,面向生产过程。
上位机选用国内广泛应用的研华IPC-610工控机,配有PIII处理器、64MB内存,具有较高性价比。因现场通信距离较远,配置一块RS422/485通信卡,用双绞线将其串口与PLC通信模块(AJ71UC24)RS422端口相连,以串行通信方式完成二级间通信,实现监控焊接过程。上位机RS232口经适配器(SC-09)转换与PLC
CPU模块连接,用于对PLC控制软件的编程。
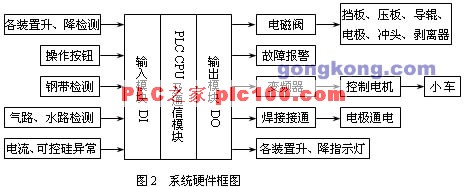
钢带生产现场噪声干扰及环境污染严重。我们选作主控单元的三菱公司A2A系列PLC,采用模块式结构,可靠性高,配置灵活,且具有良好的环境适应性和抗干扰能力;使用简单,只需相应外设或编程软件包(如MEDOC),即可完成控制程序的编写。它负责焊接工艺的电气逻辑控制,包括各焊接设备的状态检测、钢带检测;执行逻辑、算术运算;输出执行指令,完成小车前后运行、焊接启停、各电磁阀及状态过程等的控制。PLC控制系统硬件配置如图2所示。
3
系统优化及功能实现
系统设有自动/手动2种控制方式,由选择开关转换。由于钢带搭接定位时的不确定性,故以手动操作为主要控制方式。自动方式仅在手动操作将钢带搭接定位、压紧后,才自动按预定逻辑顺序运行。当系统发生紧急故障时,按急停按钮可终止当前所有设备运行;当设备出现故障或工艺参数不正常时,由PLC启动灯光及蜂鸣器报警,且仅当故障排除后,才能有效通过按钮使报警复位。焊机设备工作时,PLC控制主电控柜上的对应状态指示灯亮,上位机模拟显示现场各机电设备的动作,方便了中控室操作员对整个工艺流程的监视。
调节焊接电流和小车速度,可有效焊接不同板厚(0.28~0.9mm)钢带。小车驱动装置由变频调速器、控制电机、皮带及进给丝杆构成。工作时,变频调速器启动电机,经皮带传动进给丝杆,驱动小车前后移动,移动到前后极限点即停。通过设定变频调速器输出频率的上下限及调整速度调节器,可实现小车速度在要求范围内(6~12m/min)连续调节。
焊接电流与焊缝质量直接相关。焊接电流回路主要由晶闸管、电流监视器及焊接变压器3部分组成。在焊接变压器前串联了一套交流调压装置,控制晶闸管门极导通角,调节焊接电压值,即可控制焊接电流。由于晶闸管工作时电流较大(瞬间可达800A),易发热致损,为此设有循环冷却水路。对系统的气路、水路、焊接电流主回路中的电流平衡、晶闸管异常等都设有检测保护开关。各检测信号串联,作为PLC启动焊接的联锁条件,保证系统在正常条件下工作。
为提高系统的可靠性,还作了如下优化设计:
(1)控制电机选用具有先进抱闸技术的进口日立电机,它动态性能好,启动平稳,转矩大,停止反应迅速、准确,有效克服了原电机因反应滞后而产生的误动作。
(2)先行钢带检测由接近开关改为光电开关。由于钢带在运行中经常产生颤动而摩擦到接近开关,使其致损失灵。改用可远距离检测的光电开关后,隐患消除。
(3)对电极、压板、挡板、导辊及剥离器等动作的检测由限位开关改为接近开关。由于接近开关的非接触性检测,有效克服了气缸因气压不稳等因素对检测开关的冲撞。
(4)为抑制电源及变频调速器对PLC控制系统的噪声干扰,采用线路滤波器、隔离变压器及分离开关单独供电。线路滤波器安装时尽量靠近PLC电源,用最短的双绞线连接,且将其输入、输出线的配线分开;变频调速器及其配置的滤波器尽量置于柜体底部,缩短柜内线段,滤波器的外壳接地。
(5)对检测开关、PLC的I/O信号采用专用的24V净化电源,提高信号线路的抗干扰能力及整套设备的电磁兼容性。
(6)采取合理的配线方式。控制线路、电源线路和信号线路分别独立配线,而且相互间保持一定距离,设法避免长距离平行配线,采取垂直交叉走线方式,以及输入、输出信号线分槽布置。对速度调节、时间设定等模拟信号采用双绞屏蔽电缆传送,并将信号线屏蔽层一端可靠接地。
4
系统软件设计
4.1 PLC软件设计
采用状态设计法编制控制程序梯形图。状态设计法就是根据具体对象的运动状态分配中间变量作标记,然后针对各个状态给予实际控制的设计方法。其关键是确定系统在工艺流程中的状态及状态转化的条件,分析系统的状态必须充分考虑各种情况。在本系统软件设计中,首先按工艺流程对焊机各运行状态(如挡板下降、导辊上升、小车前进、焊接开始等)分配中间变量;然后确定各状态的先后次序及联锁关系;明确系统所要涉及到的输入、输出量,画出PLC各输出信号与输入信号的逻辑关系;再由逻辑关系转化为梯形图。该程序分别由钢带定位、小车控制、过程监控、故障诊断等控制程序组成,采用状态设计法编制后,梯形图程序流程有序、逻辑清晰。钢带焊接过程时间虽短,但条件多,动作复杂,为此,将系统的运行和故障联锁等全部由PLC控制,以提高系统的可靠性;在软件设计中适当添加联锁条件,使各动作间严格确保相互约束或定时关系;建立合适的状态标志位,如对焊机的“焊接完了”、“小车前后条件”、“故障停机”等建立标志位,并准确应用于各控制状态的设计中;设置识别及处理故障的能力,对系统中的冷却水、空压及变频器等异常采用延时确认方式。
4.2
上位机软件设计
上位机监控软件以中文Windows98作操作系统,选用Intellution公司的Fix6.1编程,该组态软件具有较高的稳定性和兼容性,直观的图形界面便于操作人员学习和使用。监控软件与PLC的通信采用三菱PLC的MultiLink协议,波特率为19.2Kb/s,8位数据位,端口设为COM3。采用模块化结构方式编制,用以完成计算机通信硬件参数的初始化和PLC通信数据的格式定义,实现两极间的通信管理:包括PLC发送数据的接收、校验和译码;对PLC内存单元数据的实时采集、处理,在屏幕上以抽象图形模拟显示现场各机电设备的运行状态,反映系统各电气信号的数据变化;根据实际控制需要,向PLC内存写入新的数据,下发命令给CPU。当焊机出现故障时,除声音报警外,还动态显示故障点,并提供故障原因及解决措施的查询画面。若需要进一步查明设备的工作状态,软件的高级管理部分给出了PLC程序实时运行时的梯形图,通过在线监视映象PLC
I/O点的位软元件的开/断状态,来确认对应外部设备的动作是否到位、PLC输入输出点与程序内部各点是否一致,从而给操作人员提供了更直接的故障探查手段,以迅速确定故障点。在进入高级管理画面前设有口令管理,使合法操作员才可进入对PLC的监视。通过访问高级管理,可抛开PLC编程软件的监控,有效防止运行MEDOC对PLC可能产生的误操作。具体监控程序框图见图3。
5
结束语
滚焊机采用PLC控制后,大大简化了复杂的继电器逻辑,提高了系统的可靠性;操作简单,运行稳定,焊接效果良好,圆满地完成了用户提出的控制要求。运行近一年来,保持零故障,经济效益和社会效益显著。
[作者简介]肖麟芬(1971―),男(汉),江西吉水人,工程师,主要从事自动化技术的研究和应用工作。 |