(1)工作原理
步进电机控制主要有三个重要参数即转速、转过的角度和转向。由于步进电机的转动是由输入脉冲信号控制,所以转速是由输入脉冲信号的频率决定,而转过的角度由输入脉冲信号的脉冲个数决定。转向由环形分配器的输出通过步进电机A、B、C相绕组来控制,环形分配器通过控制各相绕组通电的相序来控制步电机转向。
如图1给出了一个双向三相六拍环形分配器的逻辑电路。电路的输出除决定于复位信号RESET外,还决定于输出端QA、QB、QC的历史状态及控制信号-EN使能信号、CON正反转控制信号和输入脉冲信号。其真值表如表1所示。
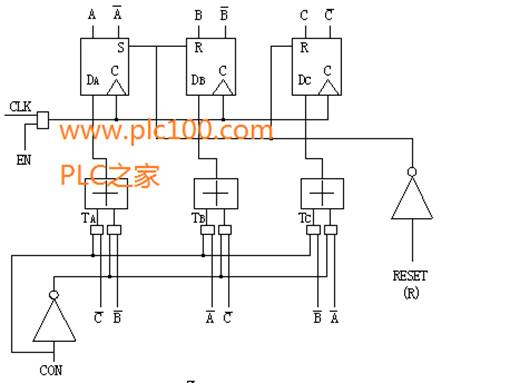
图1
步进电机环形分配器
表1
真值表
|
CON |
1 |
0 |
|
Z |
EN |
CLK |
A |
B |
C |
A |
B |
C |
|
1 |
Φ |
Φ |
1 |
0 |
0 |
1 |
0 |
0 |
|
0 |
1 |
↑ |
1 |
0 |
1 |
1 |
1 |
0 |
|
0 |
1 |
↑ |
0 |
0 |
1 |
0 |
1 |
0 |
|
0 |
1 |
↑ |
0 |
1 |
1 |
0 |
1 |
1 |
|
0 |
1 |
↑ |
0 |
1 |
0 |
0 |
0 |
1 |
|
0 |
1 |
↑ |
1 |
1 |
0 |
1 |
0 |
1 |
|
0 |
1 |
↑ |
1 |
0 |
0 |
1 |
0 |
0 |
(2)程序设计
程序设计采用组合逻辑设计法,由真值表可知:
当CON=0时,输出QA、QB、QC的逻辑关系为:

当CON=1时,输出QA、QB、QC的逻辑关系为:

当CON=0,正转时步进机A、B、C相线圈的通电相序为:

当CON=1,反转时各相线圈通电相序为:

QA、QB、QC的状态转换条件为输入脉冲信号上升沿到来,状态由前一状态转为后一状态,所以在梯形图中引入了上升沿微分指令。
PLC输入/输出元件地址分配见表2。
表2
PLC输入/输出元件地址分配表
|
PLC IN |
代号 |
PLC OUT |
代号 |
|
X0 |
CLK |
Y0 |
QA |
|
X1 |
EN |
Y1 |
QB |
|
X2 |
RESET |
Y2 |
Qc |
|
X3 |
CON |
|
|
根据逻辑关系画出步进电机机环形分配器的PLC梯形图,如图2所示。
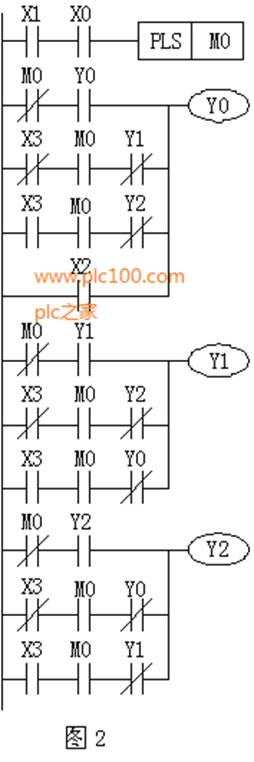
图2
环形分配器的梯形图
梯形图工作原理简单分析如下:设初始状态为RESET有效。X2常开触点闭合,Y0输出为“1”状态,Y1、Y2为“0”状态,RESET无效后,上述三输出状态各自保持原状态。CON=0(X3=0),当EN(X1=1)有效,且有输入脉冲信号CLK(X0)输入,CLK(X0)上升沿到来,M0辅助继电器常开触点闭合一个扫描周期。在此期间,各输出继电器状态自保持失效,Y0输出保持为“1”状态,Y1输出由“0”变“1”,Y2输出状态为“0”。一个扫描周期过后,M0常开触点断开,常闭触点闭合,各输出继电器状态恢复自保持,等待下一个输入脉冲信号上升沿的到来。