|
一:引言
塑钢门窗近几年在国内方兴未艾,传统塑钢门窗都是推拉窗,但推拉窗气密性和开启方式等方面存在一系列不便和缺陷,而随着人们生活水平的提高,平开翻转窗开始进入市场。平开翻转窗和推拉窗的结构区别在于五金件上,目前国内平开翻转窗五金件主要从国外进口。北新建材(集团)有限公司2001年在国家经贸委的支持下上马全国第一条全自动门窗五金冲压线,对于生产出来的五金件质量的寿命检测是一个新的问题。
五金件质量的寿命检测目前国内没有标准,我们参考欧洲的标准主要有以下几方面要求:
1:开启寿命:要求不低于50000次,动作要求模拟人工开启门窗,即先平开,执手在第一开关位置时(如图1中位置),为起始位置。逆时针转动90。 到平开位置,水平向外平开,窗扇开启大约35。(以平开转轴位置为轴心),然后关闭窗扇,将执手顺时针旋转90。 到关闭位置;平开动作结束,执手回到第一开关位置时,再将执手逆时针转动180。 到上悬位置,向外、向下拉平开上悬,窗扇开启大约15。(以平开下转轴位置为轴心),然后关闭窗扇,将执手顺时针旋转180。 到关闭位置;此平开与上悬为一个动作周期,为一次平开上悬开启。
2:开启频率:检测频率为5次/分
3:开关门窗力不大于100N,开启执手力矩不大于1N.m;
据笔者在国内和欧洲五大五金件生产厂参观的结果看,主要是用气缸来实现以上动作,虽然基本可以实现动作,但如果窗型复杂,这种设备适用的灵活性和方便性极差,我们考虑用伺服电机和滚珠丝杠来实现以上动作并克服其弊端,设备已调试完毕,运行效果良好。
二:系统设计
1. 系统结构
上面如1图是我们要用来做实验的窗体图。
其中1为平开转的方向
2为上悬转的方向
3为执手,如图执手在第一开关位置,即窗户关闭的位置
下面如2图是设备的结构简图
2图中1,2号为伺服电机,其中1号电机用于转把手,2号电机用于推拉窗户,2号电机的出轴用的是丝杠。1,2号电机的出轴分别加装扭力和拉力传感器,图中3的长杆作用于窗善的执手处,
2.系统工作原理
我们用两台伺服电机,这里我们选用了三菱公司的MR-J2S-A型伺服电机,一台用于开执手,一台用于开窗扇,用三菱公司的FX2N型PLC控制整个系统的协调工作,系统的状态由触摸屏来显示和调整,如工作频率和次数的设定,实际工作次数、系统故障原因及拉力和扭力的显示。拉执手的长杆在执手
接头处有一类似于机器手的万向接,便于换向。
现将系统的工作流程描述于下:
1) 在触摸屏上设定工作频率和次数和窗型大小。
2) 在操作台上选定是要进行平开检测还是要进行平开上悬开检测(以下以平开上悬为例描述),启动任务,系统开始运行。
3) 首先1号伺服将执手逆时针旋转90º到平开位置,即将执手置于水平位置。
4) 2号伺服沿丝杠方向将窗扇通过执手往外平开,窗扇开启大约35。(以平开转轴位置为轴心,即1图中的2处)。
5) 2号伺服沿丝杠方向将窗扇通过执手往里关上。
6) 1号伺服将执手顺时针旋转90º到关闭位置,即起点位置。以上完成一次平开检测。
7) 1号伺服将执手逆时针旋转180º到上悬位置,即和窗扇平行位置。
8) 2号伺服沿丝杠方向将窗扇通过执手往外平开,窗扇开启大约15。(以平开下转轴位置为轴心,即1图中的1处)。
9) 2号伺服沿丝杠方向将窗扇通过执手往里关上。
10) 1号伺服将执手顺时针旋转180º到关闭位置,即起点位置。以上完成一次平开上悬检测。
以上是实验机的工作流程,由于窗型大小不一,窗扇开启35º时,2号伺服
沿丝杠方向行走距离不一样,所以每次实验开始必须要在触摸屏上选定窗型大小,另外有外平开和平开上悬窗户的区别,它们的工作流程也不一样,所以要在工作前选好,否则会损坏五金件。
三:硬件设计
根据系统工作原理和工艺要求,为了使系统具有广泛的灵活性和适用性,电气系统图如图3。
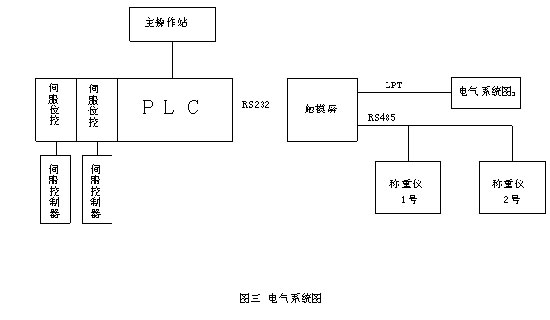
PLC共50点,其中30点输入,20点输出,为了节约成本,考虑到本系统的特性,我们用2块单轴位控模块来控制两个伺服电机,触摸屏和PLC间通过RS232串口通讯,由于工艺要求在开关窗户时需要测量扭执手和拉窗扇的力,便于分析五金件损坏的原因,我们分别在两个伺服电机的出口装了拉力和扭力传感器,传感器的信号给称重仪进行变送输出,称重仪可以设定拉力或扭力的上限值,通过开关点输出给PLC,而工艺要求在触摸屏实时显示拉力和扭力值,我们用触摸屏的RS485口和两台称重仪RS485口实时通讯,方式是根据地址和它们分时进行。另配微打随时打印拉力值和扭力值,微打和触摸屏的LPT口直接相连。
由于伺服电机的特殊性,每工作一段时间我们需要找一次各电机的零点,保证每次工作循环在同一原点,所以用了两个接近开关用作两个伺服的原点检测。
四:软件设计
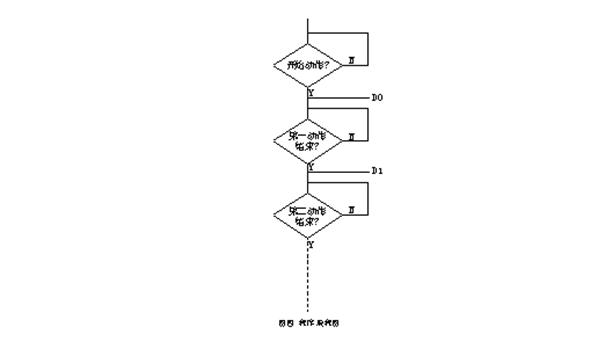
系统软件分为PLC系统控制程序和触摸屏与称重仪及微型打印机的通讯程序。系统控制程序用梯型图编制,主要完成系统的逻辑控制,使得系统各设备能协调工作.PLC控制程序分为手/自动程序,其中手动程序是将一个完整的自动过程分解成四步:平开打开,平开关闭,上悬打开,上悬关闭,其主要用于调整用。而自动程序分为自动平开和自动上悬。对于本程序来讲控制伺服部份的程序是关键。通常情况下,伺服电机一般用于单一目的送料或单一轨迹的行走,但本程序中,每个程序周期中伺服的行走轨迹每一步都要变化,因此要实时的跟踪伺服所处状态,即伺服是处于运行还是到位状态。本例中我们用了八个数据寄存器D0-D7,D0到D7中分别是伺服每步移动的距离值,程序流程图见图四。伺服控制器中有一个专门的缓冲区存取伺服马达每转一圈所需脉冲数,伺服马达每转一圈移动的距离,伺服马达的最高速度和运行速度,伺服马达目标移动距离等系统数据。程序运行的每个分步完成后,将D0―D7的值分别送到伺服的缓冲中去,同时D0―D7的值要在触摸屏上能显示和修改,因为对于不同的窗型D0―D7的值不同,同时在触摸屏上也要求能修改伺服的运行速度和工作循环次数,这样大大的提高了设备的工作效率和灵活性。
另外本系统中有两台称重仪要和触摸屏通讯,由于是采用RS485串口通讯,触摸屏一个时刻只能和一台称重仪通讯,因此我们采用分时的方式分别和1#,2#称重仪通讯,从而将拉力值和扭力值在触摸屏上显示。
本系统成功地克服了用气缸进行的门窗实验机的缺陷,具有很高的灵活性和广泛的适应性,填补了高档门窗实验机的空白。
 |