1.
画出三相异步电动机即可点动又可连续运行的电气控制线路。
2.
画出三相异步电动机三地控制(即三地均可起动、停止)的电气控制线路。
3.为两台异步电动机设计主电路和控制电路,其要求如下:
⑴
两台电动机互不影响地独立操作启动与停止;
⑵
能同时控制两台电动机的停止;
⑶
当其中任一台电动机发生过载时,两台电动机均停止。
4.试将以上第3题的控制线路的功能改由PLC控制,画出PLC的I/O端子接线图,并写出梯形图程序。
5.
试设计一小车运行的继电接触器控制线路,小车由三相异步电动机拖动,其动作程序如下:
⑴
小车由原位开始前进,到终点后自动停止;
⑵
在终点停留一段时间后自动返回原位停止;
⑶
在前进或后退途中任意位置都能停止或启动。
6.
试将以上第5题的控制线路的功能改由PLC控制,画出PLC的I/O端子接线图,并写出梯形图程序。
7.
试设计一台异步电动机的控制电路。要求:
⑴
能实现启、停的两地控制;
⑵
能实现点动调整;
⑶
能实现单方向的行程保护;
⑷
要有短路和过载保护。
8.
试设计一个工作台前进――退回的控制线路。工作台由电动机M拖动,行程开关SQ1、SQ2分别装在工作台的原位和终点。要求:
⑴
能自动实现前进―后退―停止到原位;
⑵
工作台前进到达终点后停一下再后退;
⑶
工作台在前进中可以立即后退到原位;
⑷ 有终端保护。
9.
有两台三相异步电动机M1和M2,要求:
1)
M1启动后,M2才能启动;
2)
M1停止后,M2延时30秒后才能停止;
3)
M2能点动调整。
试作出PLC输入输出分配接线图,并编写梯形图控制程序。
10.
设计抢答器PLC控制系统。
控制要求:1抢答台A、B、C、D,有指示灯,抢答键。
2裁判员台,指示灯,复位按键。
3抢答时,有2S声音报警。
11.设计两台电动机顺序控制PLC系统。
控制要求:两台电动机相互协调运转,M1运转10S,停止5S,M2要求与M1相反,M1停止M2运行,M1运行M2停止,如此反复动作3次,M1和M2均停止。
12.设计PLC三速电动机控制系统
控制要求:启动低速运行3S,KM1,KM2接通;中速运行3S,KM3通(KM2断开);高速运行KM4,KM5接通(KM3断开)。
14.设计交通红绿灯PLC控制系统
控制要求:1东西向:绿5S,绿闪3次,黄2S;红10S。
2南北向:红10S,绿5S,绿闪3次,黄2S。
15.设计彩灯顺序控制系统
控制要求:1
A亮1S,灭1S;B亮1S,灭1S;
C亮1S,灭1S;D亮1S,灭1S。
2 A、B、C、D亮1S,灭1S。
3
循环三次。
17.设计电动机正反转控制系统
控制要求:正转3S,停2S,反转3S,停2S,循环3次。
18.用PLC对自动售汽水机进行控制,工作要求:
(1)
此售货机可投入1元、2元硬币,投币口为LS1,LS2;
(2)
当投入的硬币总值大于等于6元时,汽水指示灯L1亮,此时按下汽水按钮SB,则汽水口L2出汽水12秒后自动停止。
(3)
不找钱,不结余,下一位投币又重新开始。
请:A、设计I/O口,画出PLC的I/O口硬件连接图并进行连接;
B、画出状态转移图或梯形图;
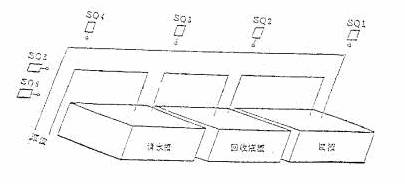
20.设计电镀生产线PLC控制系统
控制要求:1SQ1―SQ4为行车进退限位开关,SQ5―SQ6为上下限为开关。
2工件提升至SQ5停,行车进至SQ1停,放下工件至SQ6,电镀10S,
工件升至SQ5停,滴液5S,行车退至SQ2停,放下工件至SQ6,定时6S,工件升至SQ5停,滴液5S,行车退至SQ3停,放下工件至SQ6,定时6S,工件升至SQ5停,滴液5S,行车退至SQ4停,放下工件至SQ6。
3完成一次循环。
21.有一3台皮带运输机传输系统,分别用电动机M1、M2、M3带动,控制要求如下:
按下起动按钮,先起动最末一台皮带机M3,经5S后再依次起动其它皮带机。
M3 -> M2 -> M1
正常运行时,M3、M2、M1均工作。
按下停止按钮时,先停止最前一台皮带机M1,待料送完毕后再依次停止其它皮带机。
M1 -> M2 -> M3
请:(1)写出I/O分配表;
(2)画出梯形图图。
22.
使用传送机,将大、小球分类后分别传送的系统。
 左上为原点,按启动按钮SB1后,其动作顺序为:下降
→
吸收(延时1S)
上升
→右行→下降→ 释放(延时1S)→
上升 → 左行。
左上为原点,按启动按钮SB1后,其动作顺序为:下降
→
吸收(延时1S)
上升
→右行→下降→ 释放(延时1S)→
上升 → 左行。
其中:LS1:左限位;LS3:上限位;
LS4:小球右限位; LS5:大球右限位;
LS2:大球下限位
LS0:小球下限位
注意:机械壁下降时,吸住大球,则下限位LS2接通,然后将大球放到大球容器中。
若吸住小球,则下限位LS0接通,然后将小球放到小球容器中。
请:a:设计I/O;
b:画梯形图;
c:写出指令系统;